Eine neue Art des Autofahrens
Die große Vision der Automobilindustrie ist das autonome Fahren. Seitdem Google seine autonom fahrenden Autos vorgestellt hat, sind die Automobilhersteller, ihre Zulieferer, aber auch IT-Firmen und die Wissenschafts-Community gespannt auf die kommende Revolution in der Mobilität. Jedes Geschäftsmodell, das auf dem Transport von Personen oder Gütern basiert, wird sich durch diese neue Technologie verändern. Neue Geschäftsmodelle, die heute noch gar nicht existieren, werden entstehen. Der größte Vorteil des autonomen Fahrens ist ein höherer Fahrkomfort und eine erhöhte Fahrsicherheit. Sobald die Fahrer sich nicht mehr auf den Verkehr konzentrieren müssen, haben sie freie Zeit während der Reise, um andere Dinge zu tun, wie zum Beispiel im Internet zu surfen oder in virtuelle Welten einzutauchen. Ich denke, dass speziell diese zukünftigen Anwendungen die Hauptantriebskraft für Firmen wie Google sind, um Millionen und Milliarden von Dollar in die Entwicklung des autonomen Fahrens zu investieren.

Abbildung 1: Augenbewegungen von 20 Fahrern dargestellt mit einer Scan-Path-Visualisierung.
Jedoch gibt es mehrere Herausforderungen, die bei der Realisierung des autonomen Fahrens gemeistert werden müssen. Meiner Meinung nach ist der Fahrer oder die Fahrerin die größte Herausforderung. Da das autonome Fahren nicht sofort vollständig umgesetzt wird, wird es auch automatisierte (Level 2 bis 4) Fahrzeuge für viele Jahre auf der Straße geben. Diese automatisierten Fahrzeuge werden die Möglichkeit besitzen, in manchen Situationen autonom zu fahren, zum Beispiel auf der Autobahn. In anderen Situationen, wie im innerstädtischen Straßenverkehr, wird der Fahrer selbst die Verantwortung behalten. Gerade in diesen Situationen spielt eine sichere Übergabe der Kontrolle vom Fahrzeug an den Fahrer und wieder zurück eine Schlüsselrolle für einen hohen Sicherheitsgrad der Fahrzeuge.
Stellen wir uns folgende Situation vor: Sie Fahren eine Straße entlang und erreichen eine stark befahrene Kreuzung mit vielen Fußgängern, Motorradfahrern und Fußgängern. Dann sind da noch Straßenschilder und eine Ampelanlage. Einige Sekunden bevor Sie diese Kreuzung erreichen, entscheidet das Fahrzeug, die Kontrolle an Sie zurückzugeben. Dafür kann es eine Vielzahl von Gründen geben, von unklaren Sensorwerten bis hin zu juristischen Gründen.![]()
Eye Tracking – Eine Schlüsseltechnologie für das automatische Fahren
Die große Frage ist wie man diesen Übergabeprozess so gestaltet, dass er erfolgreich ist und in nahezu jeder Verkehrssituation an jedem Ort der Erde funktioniert. An dieser Stelle kommt das Eye-Tracking ins Spiel! Eine mögliche Lösung für die Anfahrt der Kreuzung könnte so aussehen: Ein Eye-Tracker nimmt die Augenbewegungen in dieser Situation auf. Abbildung 1 zeigt den Scan-Path von zwanzig Fahrern in dieser Situation. Mit Hilfe von Verfahren der Bilderkennung wird berechnet, welche Objekte im Straßenverkehr durch die Fahrer und Fahrerinnen betrachtet worden sind. Durch die Kombination von Eye-Tracking und Bilderkennung können die Embedded-Systeme auf dem Fahrzeug berechnen, wie der Fahrer eine Verkehrssituation wahrnimmt und was er im Straßenverkehr erkannt hat und was nicht. Diese Information kann nun das Fahrzeug nutzen, um den Fahrer personalisiert zu unterstützen und ihn vor Gefahren im Straßenverkehr zu warnen, die er nicht rechtzeitig wahrgenommen hat. Ich denke, dass dieses System die fehlende Komponente für eine erfolgreiche Realisierung des automatisierten Fahrens ist.
Nahezu jeder Automobilhersteller führt heute Eye-Tracking-Experimente durch. Das häufigste Ziel der Experimente ist es, die Usability des Interieurs zu optimieren. Unsere Recherche zeigte jedoch auch, dass eine zunehmende Anzahl von Ingenieuren Eye-Tracking für die Entwicklung des automatisierten Fahrens nutzen möchte. Für diese Art von Experimenten müssen sie das Blickverhalten von hunderten von Probanden in einer Vielzahl von Experimenten analysieren. Je höher die Anzahl der Testfahrten ist, umso besser können sie ihre Fahrer verstehen. Mit heutigen Auswertemethoden steigt der Aufwand für die Analyse der Probanden linear mit der Anzahl an. Das bedeutet für die Automobilfirmen, ihre Zulieferer und Forschungseinrichtungen sehr hohe Kosten für die Analyse dieser Experimente.
Visual Analytics für Eye Tracking
Abbildung 2: Visual-Analytics ist eine vielversprechende Lösung für die Analyse von großen Eye-Tracking-Daten. Diese Methode kombiniert die menschliche Fähigkeit visuelle Muster zu erkennen mit der Leistungsfähigkeit von Computern.
Während er letzten Jahre haben wir intensiv auf dem Gebiet der Analyse von großen Eye-Tracking-Datensätzen gearbeitet. Eine sehr vielversprechende Lösung für die Analyse der Datensätze haben wir in der sogenannten Visual-Analytics-Methode gefunden. Diese Methode kombiniert die menschliche Fähigkeit schnell visuelle Muster zu erkennen mit der Leistungsfähigkeit von Computern (siehe Abbildung 2).
Im Gegensatz zum klassischen Ansatz aus der Psychologie: 1.) Hypothese formulieren 2.) Experiment durchführen und 3.) die Ergebnisse analysieren und Signifikanzwerte berechnen, bietet Visual-Analytics einen explorativen Ansatz, die Daten zu untersuchen. Da Visual-Analytics rechnergestützte Mustererkennungsverfahren nutzt, können damit typischen Blickpfade und Muster in verschiedenen Gruppen von Fahrern erkannt werden, bzw. auf Basis dieser Metriken auch direkt Gruppen von Fahrern gebildet werden, die eine Verkehrssituation ähnlich wahrnehmen (siehe Abbildung 3). Diese Methode kann auch dazu eingesetzt werden, um Korrelationen zwischen den Augenbewegungen und anderen Informationskanälen zu finden. Speziell diese Eigenschaft führt dazu, dass Visual-Analytics die perfekte Technologie für den Automobilbereich darstellt, wo ja viele weitere Informationen wie Geschwindigkeiten oder Lenkradaktivitäten in die Analyse mit einfließen müssten (Abbildung 4).![]()
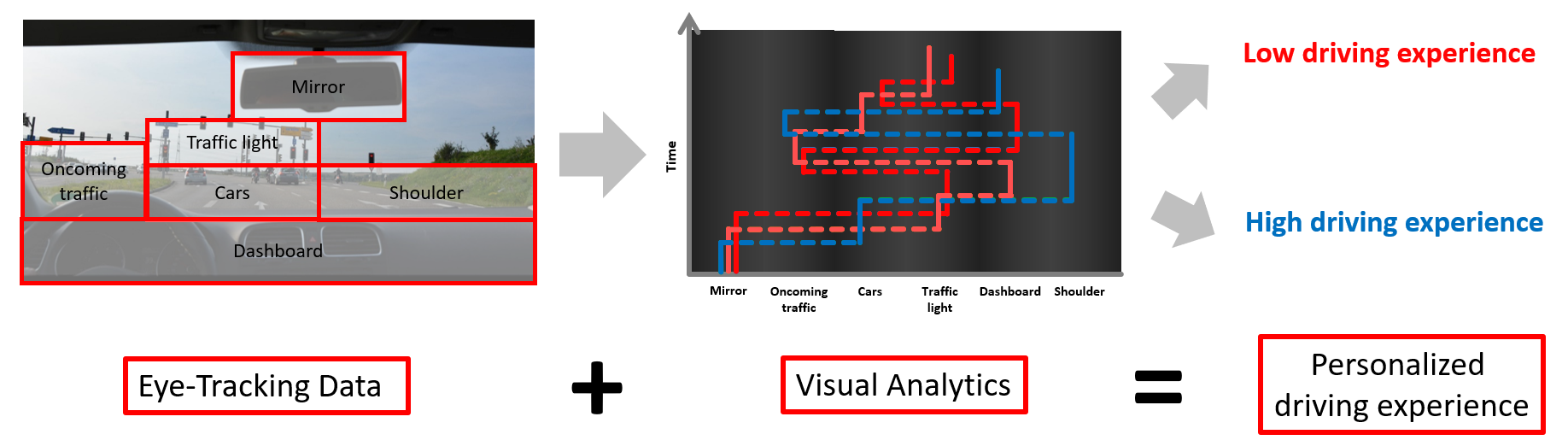
Abbildung 3: Mit Visual-Analytics können typische Scan-Paths oder Muster in den Augenbewegungen auch bei einer großen Anzahl von Probandendaten gefunden werden.
![]()
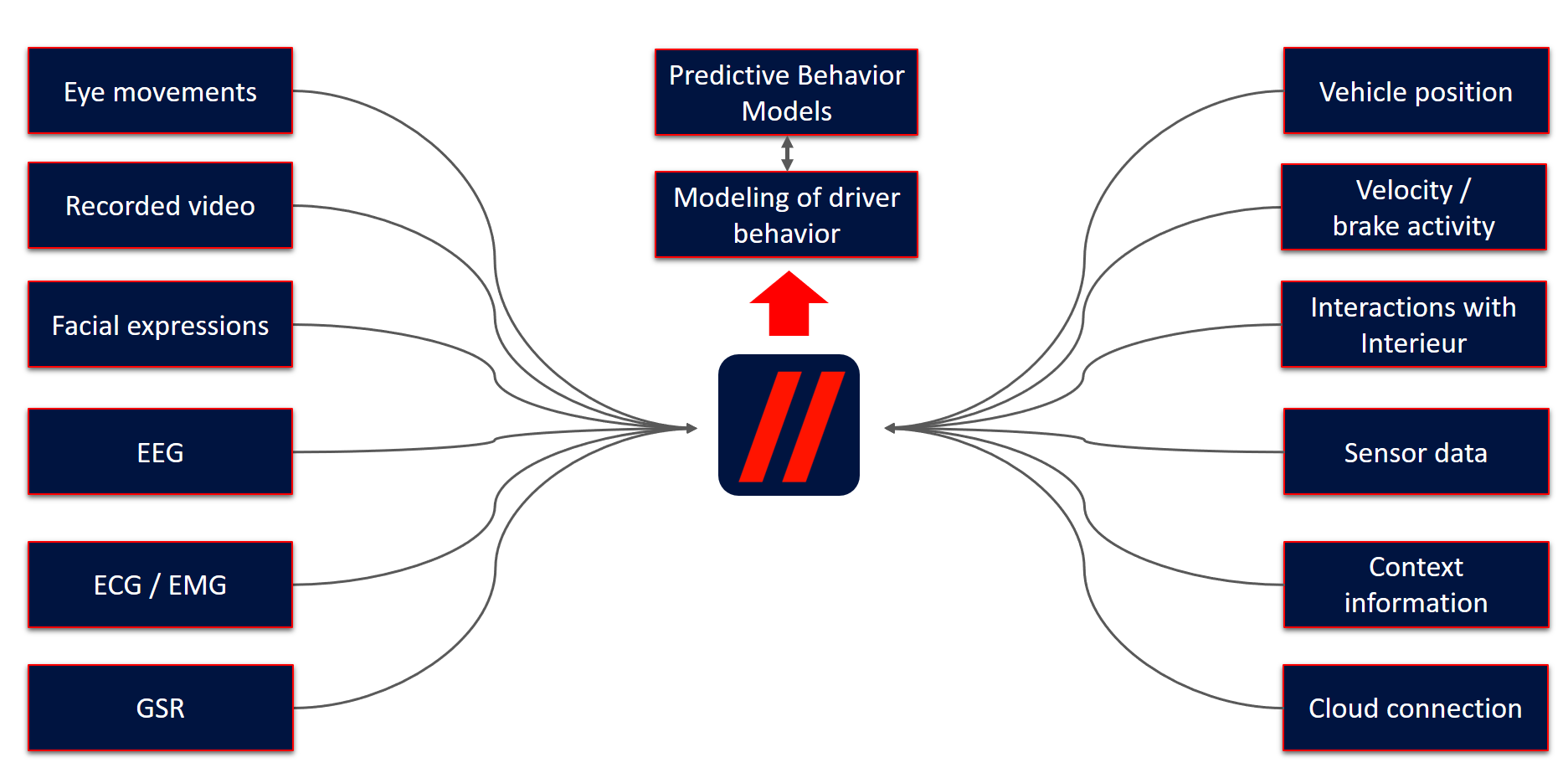
Abbildung 4: Neben Augenbewegungen, können weitere Sensorkanäle wie die Fahrzeuggeschwindigkeit oder Lenkradwinkel in die Analyse einfließen, um noch besser das Fahrerverhalten zu verstehen.
All diese Datenströme können damit in den Analyseprozess mit eingebunden werden. Im Falle des automatisierten Fahrens, können die Fahrzeughersteller Fahrermodelle entwickeln, die das typische Fahrerverhalten in verschiedenen Situationen berechnen oder voraussagen. Diese Modelle können als die Kernkomponente für die Unterstützung des Fahrers bei der Übergabe dienen.
Die in diesem Artikel beschriebene Argumentation wirkt auf den ersten Blick sehr klar. Jedoch denken wir, dass es viele offene Fragen und technische Herausforderungen bei all den beschriebenen Aspekten gibt, die im Detail diskutiert und gelöst werden müssen. Für Blickshift ist es sehr spannend, zu sehen, wie wir mit unseren Produkten basierend auf der Visual-Analytics-Methode hier einen Beitrag für das erfolgreiche Meistern der einzelnen Herausforderungen bietet.
 Über den Autor
Über den Autor
Dr. Michael Raschke ist Mitgründer und Geschäftsführer der Blickshift GmbH sowie ein Experte für eine visualisierungsbasierte Analyse von Augenbewegungen. Michael ist davon überzeugt, dass der Schlüssel für die Realisierung des automatisierten Fahrens in einem tiefen Verständnis der menschlichen Wahrnehmung des Straßenverkehrs liegt. Michael ist Autor und Co-Autor von mehr als 40 Publikationen auf den Gebieten der Visualisierung, Visual Analytics, des Eye-Trackings und der Mensch-Computer-Interaktion.
Kommentare gerne direkt auch an den Autor.