Trust – a foundation for automatic driving
There are two perspectives on autonomous driving:
- Technology: Sensors with efficient sensor fusion, environment models and car-to-car as well as car-to-infrastructure communication
- Customer acceptance: Trust is the most important aspect during the transition from being an active driver to being a passive passenger.
In my opinion, German automobile manufacturers and their suppliers handle the first aspect very well. After the development of first proto types in the 90s by Daimler and other car companies, the interest about automatic driving has increased again by the success of Google’s test drives. Then, an impressive catch up race began by German companies. Today, there are level 2 (https://en.wikipedia.org/wiki/Automatic_train_operation) cars on the market and a new generation of driver assistance systems. Additionally, German OEMs and suppliers show proto types and concept cars for level 3 driving.

Of importance for the realization of automatic driving is a trustful relationship between the driver and the car.
However, the second challenge is the human being, sitting behind a steering wheel in an automatic driving car. I imagine automatic driving that way, that somebody else, perhaps a good friend of mine is driving me from A to B. When I am getting into the car, I decide unconsciously, if my friend will bring me safely to the trip’s destination. During the ride, I constantly check his reaction in different traffic situations and how fast he or she is reacting. Perhaps, I begin to feel safe. Or, I am getting nervous during the drive and finally decide to ask him or her again for a ride.
Now, the interesting question is, how we can analyze the process of creating trust during an automatic drive.
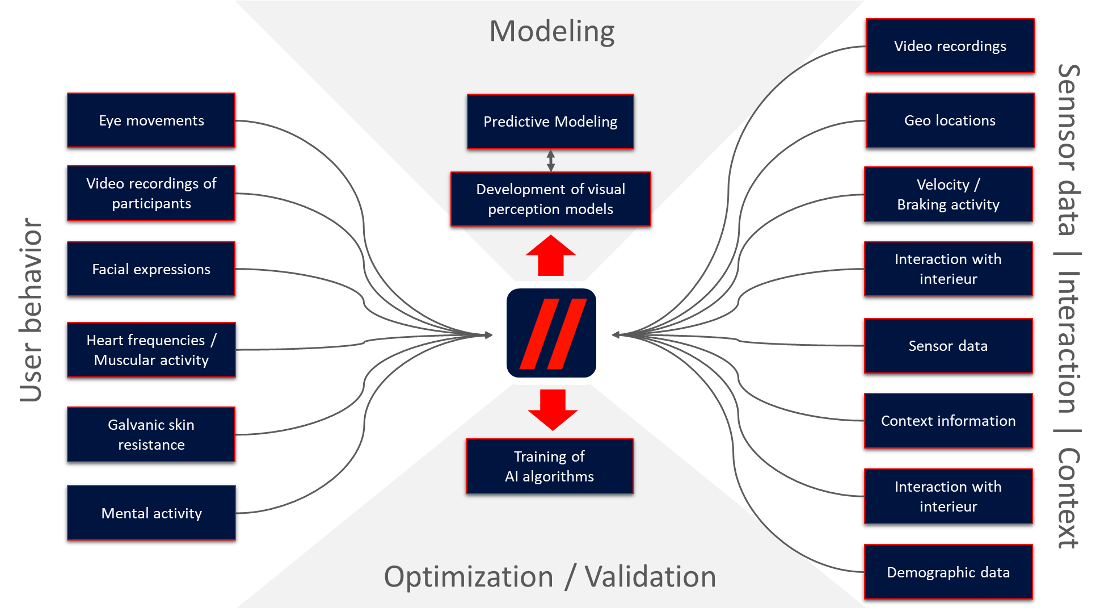
Figure 1: The combination of biometric information and car sensors together with data about the environment gives a very detailled picture of the cognitive and emotional state of the passenger. The key are perception models.
One solution is, to record biometric data about the driver, such as eye movements, heart frequency and galvanic skin response values. Next, this data is analyzed with respect to the traffic situation. If these three information channels are combined with further information from car sensors and environmental information and are processed by a perception and stress model, a very detailed insight on the driver state can be computed. On the base of the results of this model, a car adapts velocity, acceleration and other aspects of motion to the driver state and his or her optimal driving experience. Thereby, a relationship between car and passenger can be established leading to the maximum of trust between the two.
The perspective is changing from technology to the driver. The driver is in the center and we design automatic driving from his or her perspective.
I am convinced, that the necessary technologies are not science fiction anymore. A clever combination of biometric recording, perception and emotion modeling together with information about the traffic, the car’s state, analyzed with big data methods allow us to develop the components to increase the acceptance of automatic driving.
 About the author
About the author
Dr. Michael Raschke is Co-Founder and managing director of Blickshift GmbH and an expert for a visualization-based eye movement analysis. Michael is author and co-author of more than 40 scientific publications in the fields of eye tracking visualization, visual analytics, cognitive modeling and human-computer interaction.
Thank you for sending your comments to the author directly.